


Next: 制御系の基本形
Up: 伝達関数とブロック線図
Previous: 伝達関数 (Transfer Function)
ブロック線図とは、自動制御系の中での信号伝達のありさまを表す線図であって、
次の三つの要素から構成されており、矢印は信号の伝わる方向を示している。
図 1.7:
ブロック線図
![\begin{figure}\begin{center}
\psbox[scale=0.65]{eps/1-3-2.eps} \end{center} \end{figure}](img180.png) |
ブロック線図を作成する手順は次のごとくである。
- (i)
- 系のすべての信号間の関係を示す方程式をたてる。これは一般的
に微分方程式であるが、ラプラス変換した形で表す。
- (ii)
- これらの式に現れた信号全部を、信号伝達の順序に、すなわち入
力側から出力側へ次々に並べる。(通常は左側を入力、右側を出力とする)
- (iii)
- 相互間を伝達要素、加え合わせ点、引き出し点などを用いて接
続する。
- (iv)
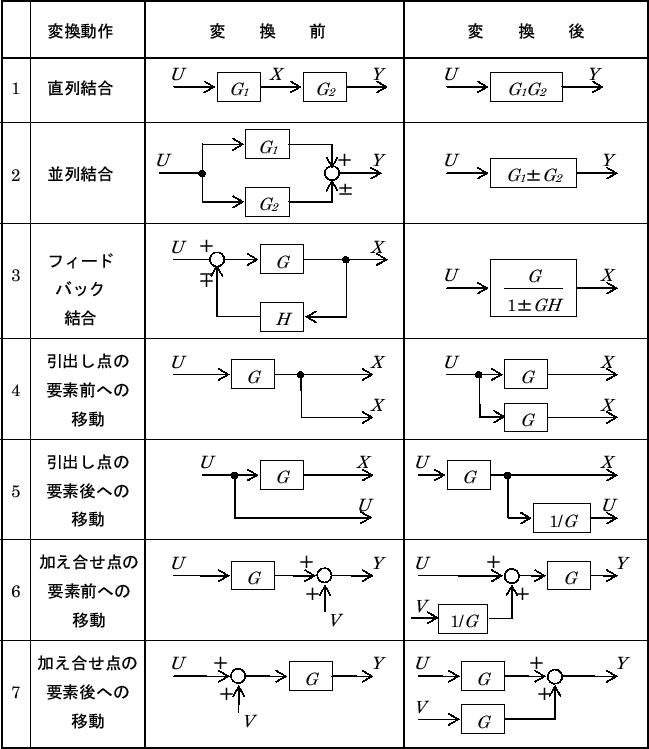
- ブロック線図が複雑な場合、不必要な信号を消去し、簡略化する。
その等価変換の方法を表1.4に示す。
表 1.4:
ブロック線図の等価変換表
 |
。【例2】2容量水位系
図 1.8:
2容量水位系の例
![\begin{figure}\begin{center}
\psbox[scale=0.65]{eps/1-3-3.eps} \end{center} \end{figure}](img182.png) |
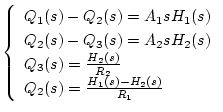
- (i)
- 図1.8の系の各信号間の関係は次式で表される。
ただし、 、
、 、
、 は流量、
は流量、 、
、 は水位、
は水位、
 、
、 は流体抵抗、
は流体抵抗、 、
、 は底面積を表す。
は底面積を表す。
図 1.9:
信号の流れとブロック線図、等価変換
![\begin{figure}\begin{center}
\psbox[scale=0.65]{eps/1-3-4.eps} \end{center} \end{figure}](img193.png) |
Yasunari SHIDAMA
平成15年4月9日