実際的な中間変数を状態変数ととって表示する方法
図2.3 に示すごとき直流サーボモータ系において、![]() を電機子回
路抵抗、
を電機子回
路抵抗、![]() を同インダクタンス、
を同インダクタンス、![]() を電機子電流、
を電機子電流、![]() を電機子の逆起電
力定数、
を電機子の逆起電
力定数、![]() を同回転トルク、
を同回転トルク、![]() をトルク定数、
をトルク定数、![]() を慣性能率、
を慣性能率、![]() を
粘性減衰抵抗、
を
粘性減衰抵抗、![]() を回転角速度、
を回転角速度、![]() を入力電圧とする。そのとき次の
関係がある。
を入力電圧とする。そのとき次の
関係がある。
いま
![]() とすれば、上式は
とすれば、上式は
と表わせる。これは
![]() を状態変数に、
を状態変数に、![]() を入力にとった状態
方程式である。
を入力にとった状態
方程式である。
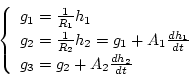
図2.4 の2槽水位系において![]() を各槽の断面積、
を各槽の断面積、![]() を各弁の流体抵抗、
を各弁の流体抵抗、![]() を各点における水の流量、
を各点における水の流量、![]() を各水
槽の水位とする。そのとき次のような関係がある。
を各水
槽の水位とする。そのとき次のような関係がある。
いま
![]() を状態変数にとり、
を状態変数にとり、![]() を入力とすれば、状態方程式
は次式となる。
を入力とすれば、状態方程式
は次式となる。
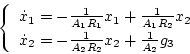
前例の場合をブロック線図で示すと 図2.5 の如くなる。 このようにブロック線図で表示されている場合
の関係があるので、
より状態方程式は
と表示される。
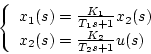
図2.6 の如きフィードバック系の場合
と書けるので状態方程式は
![\begin{figure}\begin{center}
\psbox[scale=0.40]{eps/2-2-1.eps} \end{center} \end{figure}](img14.png)
![\begin{figure}\begin{center}
\psbox[scale=0.40]{eps/2-2-2.eps} \end{center} \end{figure}](img29.png)
![\begin{figure}\begin{center}
\psbox[scale=0.40]{eps/2-2-4.eps} \end{center} \end{figure}](img42.png)