中間変数を前の変数の微分値にとる場合で、同伴形式あるいは可制御標準形 ともいう。
回転物体系の場合、回転角加速度![]() は回転角速度
は回転角速度![]() の
微分値、回転角速度
の
微分値、回転角速度
![]() は回転角
は回転角![]() の微分値の
関係がある。このような場合、例えば全体の伝達関数が次の3次形
の微分値の
関係がある。このような場合、例えば全体の伝達関数が次の3次形
で与えられたとき
と書き、状態変数を
![]() にとると、
にとると、
![]() となるのでこれを
(2.12)式に代入すると
となるのでこれを
(2.12)式に代入すると
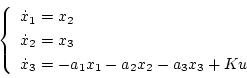
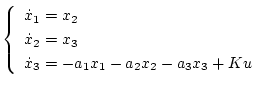
となる。したがって状態方程式は次式となる。
伝達関数が
のように零点を持つ場合は
のように二つに分け
として、これより状態方程式は次式で表示される。
このとき(2.20)式を出力方程式という。