: この文書について...
: Dsys
: 不変部分空間
![$\left [{ 前節までのお話} \right]$](img419.png)
時不変な離散時間線形システムの状態方程式
について


ということが判りました.次にこの可制御性や,可観測性の条件が,充たされない場合
すなわち, のときや
のときや  ときはどうなってしまうのか?ということを調べました.
ときはどうなってしまうのか?ということを調べました.
その結果,
 の可制御部分空間
の可制御部分空間
 |
(44) |
と,不可観測部分空間
 |
(45) |
というの部分線形空間が定義されました.
さらに行列 を
を

という写像とみなすと

ということが判りました. と
と はについて不変であると言います.
はについて不変であると言います.
さて,ここからが,この節の本題です.
以後 とします.
とします.
まず
 とします.
とします.
 とはそれぞれの部分線形空間ですから
とはそれぞれの部分線形空間ですから
 も部分線形空間です.
も部分線形空間です.
![$\left [{ 証明} \right]$](img439.png)
 とすれば
とすれば
 ゆえ
ゆえ

 ゆえ
ゆえ
よって

![$\left [{ 証明終り} \right]$](img446.png)
また



でもに対して不変.
 |
(46) |
ここで,線形代数のおさらいです.
―――――――――――――――――――
ベクトル
 が一次独立
が一次独立
 任意の
任意の
 について
について
 ならば
ならば



は
に実数
 をかけ足しあわせたもの全体の集合で,これ自身,線形空間になっています
をかけ足しあわせたもの全体の集合で,これ自身,線形空間になっています
 がの基底
がの基底
 が一次独立でかつ
が一次独立でかつ

 が部分線形空間
が部分線形空間
 の任意の元
の任意の元 と任意の実数
と任意の実数
 について
について

が部分線形空間のときの基底
を選べば
 を
を の次元といい
の次元といい で表す.
で表す.
 がの部分線形空間で
がの部分線形空間で
 のとき
のとき

特に の基底
を選べば


とできる.
―――――――――――――――――おさらい終り――
![$\left [{ 行列Aをスッキリさせる} \right]$](img477.png)
 はそれぞれ
の部分線形空間で,
はそれぞれ
の部分線形空間で,
ですから,の基底
を適当に選べば
 の基底が
の基底が 個という意味です.
個という意味です.
として,下のように,基底
を配分できます.
可制御部分空間の基底

を可制御かつ不可観測な部分空間の基底
と残りのベクトル
 (可制御かつ可観測)
(可制御かつ可観測)
不可制御部分空間の基底

を可制御かつ不可観測な部分空間の基底
と残りのベクトル
 (不可制御かつ可観測)
(不可制御かつ可観測)
上記以外のベクトル
 (不可制御かつ可観測)
(不可制御かつ可観測)
すなわち
 |
(47) |




ここで
とすれば
となります.
またそれぞれの部分空間にを作用させれば
です.
まず,
と
に注目します.
 ですから(13)式により
ですから(13)式により

すなわち,ある
 が存在して
が存在して

となります.
 の定義からさらに
の定義からさらに
 が存在して
が存在して
 でしたから
でしたから

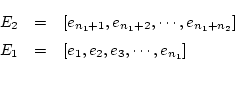
です.ここで
を並べた行列を
![$E_1=\left[{e_1,e_2,e_3,\cdots,e_{n_1}}\right]$](img521.png)
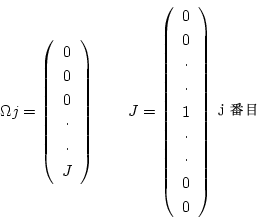
とし,
を縦に並べた列ベクトルを で表せば
で表せば

です.
全く同様に
 ですから
ですから
 が存在して
が存在して

を縦に並べた列ベクトルを で表せば
で表せば

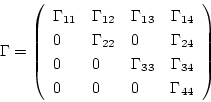
この操作を まで繰り返せば,
まで繰り返せば,
 |
(57) |
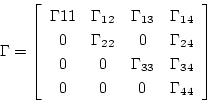
ただし
![$\Gamma_{11}=\left[{\alpha_1,\cdots,\alpha_{n_1}}\right]$](img531.png)
次に
について同様な操作により
![$E_2=\left[{e_{n_1+1},e_{n_1+2},\cdots,e_{n_1+n_2}}\right]$](img535.png)
とすると
 |
(58) |
について同様な操作により
![$E_3=\left[{e_{n_1+n_2+1},e_{n_1+n_2+2},\cdots,e_{n_1+n_2+n_3}}\right]$](img540.png)
とすると
 |
(59) |
最後に
について
![$E_4=\left[{e_{n_1+n_2+n_3+1},…,e_n}\right]$](img547.png)
として
 |
(60) |
を得ます.
以上をまとめれば
ここで
![$S=\left[{E_1,E_2,E_3,E_4}\right]$](img553.png)
とおくと

は基底ベクトルを並べたものですから
 で逆行列
で逆行列 が存在します.
が存在します.
左から の逆行列をかければ
の逆行列をかければ

![$\left[{行列Bをスッキリさせる}\right]$](img559.png)
次に行列 の各列を列ベクトルと見なして
の各列を列ベクトルと見なして
![$B=\left[{b_1,b_2,\cdots,b_m}\right]$](img560.png) と書くと,
と書くと,
![$G=\left[{A^{(n-1)}B,A^{(n-2)}B,\cdots,AB,B}\right]$](img561.png)
ですから
とすると
となり、各  について
について
が判ります。
ここで
 |
(61) |
でしたから行列 と全く同じ議論によって、
 |
(62) |
と書くことができ、
とおくと
が得られます。
で、
 |
(63) |
ですから
です。従って、
でしたから
これは
となることを示しています。
------------
以上をまとめると
「カルマンの分解」
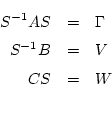
系の方程式
について
 とう変換行列が存在して
とう変換行列が存在して
という変換が可能なことが判りました。
系
系
の としています。
としています。
 と
と
 の間には
の間には
によって
と相互に変換できます。系
 の挙動を調べれば、
系
の挙動を調べれば、
系
 の挙動が判ることになります。
の挙動が判ることになります。
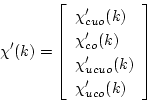
 を
を  、
、 の形に合せて
の形に合せて
と分解します。
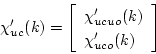
さらに の下半分に着目して
を造ると(1'),(2')から
という式が取り出せます。
 の右辺には制御
の右辺には制御  が作用する(作用させる)項がありません。
従って、
が作用する(作用させる)項がありません。
従って、 にはいくら努力して制御 を投じても効果なし
ということになります。箸にかからない。
次に
にはいくら努力して制御 を投じても効果なし
ということになります。箸にかからない。
次に
によって  が からでてくることになりますが
が からでてくることになりますが
ですから、
 の項はでてきません。
は出力 から初期点の推測もできないわけです。
棒にもかからないわけです。 結局
は箸にも棒にもかからない。
の項はでてきません。
は出力 から初期点の推測もできないわけです。
棒にもかからないわけです。 結局
は箸にも棒にもかからない。
[練習問題13]
の各要素について、上と同様に説明してください。
[練習問題14]
を示して下さい。
: この文書について...
: Dsys
: 不変部分空間
Yasunari SHIDAMA
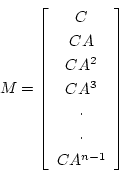
![\begin{displaymath}
M=
\left[ \begin{array}{l}
C\\
CA\\
CA^{2}\\
CA^{3}\\
・\\
・\\
CA^{n-1}\\
\end{array} \right]
\end{displaymath}](img425.png)