■プロセスと木
![]()
![]()
プロセスに関する定義を与える。次にプロセスの木表現(Tree)に関する定義を与え、木の等価性について説明する。
更に、選択や逐次接続などの木に対する操作を定義し、それらの操作に関する諸定理を列挙する。
この章で学習する内容は以下の5つである。
1. プロセスの定義(Definitions of Process)
2. プロセス木表現(Process Trees)
3. 木の等価性(Tree Equivalences)
4. 木の操作(Operations on Process Trees)
5. 諸定理(Laws)
●プロセスの定義(Definitions of Process)
1.1 定義
1.2 トランジション
1.3 2項関係parent+/child+
1.1 定義
|
Definition of Process P (Def-2.1a): ・Des(P) : a finite set of P-descendants (vertex and leaf); □ |
これらのうち、内部action "i" とは、その解釈として、
・オートマトン理論におけるε遷移、あるいは
・CCSにおけるτ(tau)トランジション
であると見做してよい。
1.2 トランジション
Tr(P)の要素は、プロセスPのトランジションである。
例えば、t = <q,a,q'> なるトランジション t があったとしよう。
(アクションaに関して、(parent+)(親/上流)、(child+)(子/下流)という2項関係Rがある)
この時、アクション a によって、プロセス内の状態 q が q' へ移ったことになる。
つまり、
t : q --(a)--> q'
である。
これは、前章の記法 [a> を用いて、
t : q [a> q'
と書ける。
"通常の終了" である Terminating process $ は以下の通り。
|
Terminating process "$" (Def-2.1b): If Des(P) contains an element without children, |
1.3 2項関係parent+/child+
プロセスPの2項関係に関して、以下が成立する。
P (parent+) q iff q is an element of Des(P). |
child+についても同様である。
前章で概観した、あるプロセスに対する動作をトレースしたグラフ(process graph)とは、上記の定義において、プロセス内の状態である Des(P)の要素 の間を、トランジション Tr(P)の要素で ラベル付きアークとして結んだものである。
(定義はともかく、通常のグラフ表示では、parent, child の状態 p,p' は省略して、Act(P)の要素、あるいは internal action "i" をラベルとして"表示"したアークを描くことが多い)
●プロセス木表現(Process Trees)
前章の1.3節において、BLA記法によるプロセスの定義方法について述べた。
その際、プロセス間の関係を示すいくつかのオペレータについて取り上げた。
それらのオペレータに関する形式的な定義を与えるために、まず、ラベル付き木(labelled tree)について定義する。
2.1 定義
2.2 木表現が可能な必要十分条件
2.3 木表現の例
2.1 定義
Pを、前節の Def-2.1 で行ったプロセスとする。
プロセスPの labelled tree を用いた木表現の定義は、以下の通り。
|
Definition of Labelled Tree : T(P) (Def-2.2a) : Let P be a process as Def-2.1. □ |
あるアクション y∈Act(T)U{i} による遷移はプロセス木 T に関して、1.2節で説明した記法 [y> を用いると、
v,v'∈V(T), labelled arc <v,y,v'>∈Arc(T)であるとき、T(v)[y>T(v') と書ける。
2.2 木表現が可能な必要十分条件
プロセス P の木表現 T(P) の定義が可能である必要十分条件は、以下の通り。
|
Representation of process tree T(P): (Def-2.2b): T represents P |
プロセス木 T(P)の節(node)には、プロセスPの「状態」が関連付けられる。
プロセス木 T(P)の葉(leaf)には、そのchildは無いため、Def.2-1bにより、$ (terminating) あるいは stop
が関連付けられる。
2.3 木表現の例
例:プロセス P3 を以下のように定義する。
P3 = a;b;$ [ ] c;$
このプロセスP3の動作は、
(1)action 'a' が発生した場合: a->b->$ の順で実行
(2)action 'c' が発生した場合: c->$ の順で実行
となる。
プロセスP3の定義は以下の通り。
・Des(P3) = { P3, b;$, $ };
・Act(P3) = { a, b, c, $ };
・Tr(P3) = { <P3,a,b;$>, <b;$,b,$>, <P3,c,$>};
プロセスP3の木表現 T(P3)の各要素については、以下の通り。
V(T) = { r, v, X1, X2 }; (* r:root, v:node, X1,X2:leaves *)
Arc(T) = { a, b, c, $ };
r(T) = P3;
ここで、Def.2-2bにおける V(T)からDes(P3)の上への写像 f の存在を確かめると、
各々以下のように導かれる。
(1) f(r(T)) = (P3),
(2) Tr(P3) (= Arc(T)) equals to a set of transition of P,
(3) ξ : (v,X1,X2) |--> (a, b, c) is an one-to-one mapping.
従って、以下のような写像 f が存在し かつ 一意であるから、プロセスP3の木表現
T(P3)は実在する。
f(r) = (P3), f(v) = (b;$), f(X1) = f(X2) = ($).
結局、プロセスP3の木表現 T(P3) は、この f を用いて以下のようになる。
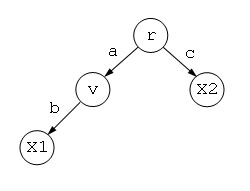
図2.1 プロセスP3の木表現 T(P3)
●木の等価性(Tree Equivalences)
与えられた2つのプロセス木について、様々な条件下における等価性について議論し、挙動の同一性について検討することが多い。
等価性の種類には、主に以下の4つがある。
(1)→(4)の順で、木の等価性に関する条件が緩くなる。
(1)強い挙動の等価性(strongly (strong bisimulation) equivalent)
(2)同型挙動の等価性(branching (stucture bisimulation) equivalent)
(3)部分挙動の等価性(Tau*a-measures equivalent)
(4)観測値での挙動の等価性(observational equivalent)
以下では、これらのうち、(1)strongly equivalent と (4)observational equivalent ついての定義を例にして説明する。
3.1 strongly equivalentの定義
3.2 observational equivalentの定義
3.1 strongly equivalentの定義
P1、P2 を、Def-2.1 に基づいたプロセスとする。
T1、T2 を、Def-2.2aに基づいた P1、P2 のプロセス木 T(P1)、T(P2)とする。
T1、T2がstrongly equivalentであることの定義は、以下の通り。
|
Definition of 'strongly equivalent' (T1,T2) (Def-2.3) Let T1 and T2 be process trees with roots r1 and r2, respectively. |
strongly equivalentであることを、記号 "=" で書く。
2つの木 T1、T2がstrongly equivalentであるならば、2つのプロセスP1、P2はstrongly equivalentである。つまり、
P1=P2 iff T(P1)=T(P2). |
例2-1:
次の2つのプロセスP1,P2は、strongly equivalentである。
Process P1 := a;b;$ [ ] a;b;$
Process P2 := a;(b;$ [ ] b;$)
この2つのプロセスP1,P2の関係は、以下のように表すことができる。
(P1 = P2) → TRUE |
※これらのプロセスP1,P2は、いずれもbranching equivalent reducing を行うと、P1' := a;b;$ に縮約される。
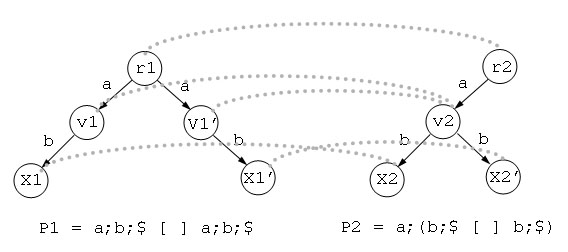
図2.2 プロセスP1,P2の木表現 T(P1),T(P2)
例2-2:
次の2つのプロセスP3,P4は、strongly equivalentである。
'i'は、internal actionである。
Process P3 := a;(b;$ [ ] i;c;$) [ ] a;i;c;$
Process P4 := a;(b;$ [ ] i;c;$)
(P3 = P4) → TRUE
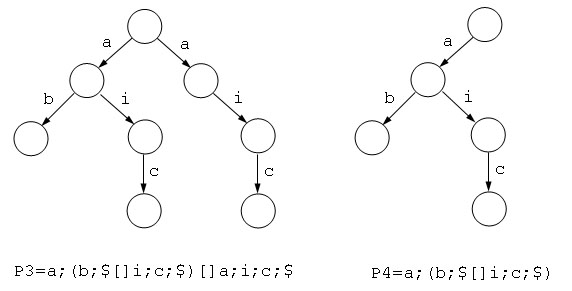
図2.3 プロセスP3,P4の木表現 T(P3),T(P4)
3.2 observational equivalentの定義
先ず、action 'a'の拡張 に関する定義を行う。
この拡張は、ある観測可能な拡張action a とは、その他のactionとともに構成されたシーケンス内に action a が含まれていればよい、とするものである。
|
Definition of 'extended action' (Def-2.4) Let 'a' be some label. |
ある観測可能な拡張action aに関するobservational equivalentの定義を以下に示す。
P1、P2 を、Def-2.1 に基づいたプロセスとする。
T1、T2 を、Def-2.2aに基づいた P1、P2 のプロセス木 T(P1)、T(P2)とする。
T1、T2が、ある観測可能な拡張action aに関して、observational equivalentであることの定義は、以下の通り。
|
Definition of 'observational equivalent' (T1,T2) Let T1 and T2 be process trees with roots r1 and r2, respectively. |
observational equivalentであることを、記号 "==" で書く。
2つの木 T1、T2がobservational equivalentであるならば、2つのプロセスP1、P2はobservational equivalentである。つまり、
P1==P2 iff T(P1)==T(P2).
定義から明らかなように、strongly equivalent であるならば、observational equivalentとなる。つまり、
T(P1)=T(P2) ⇒ T(P1)==T(P2).
例2-3:
次の2つのプロセスP1,P2は、観測可能なaction a,b,c について、observational equivalentである。'i'は、internal actionである。
Process P1 := a;(b;$ [ ] i;c;$) [ ] a;c;$
Process P2 := a;(b;$ [ ] i;c;$)
(P1 == P2) → TRUE
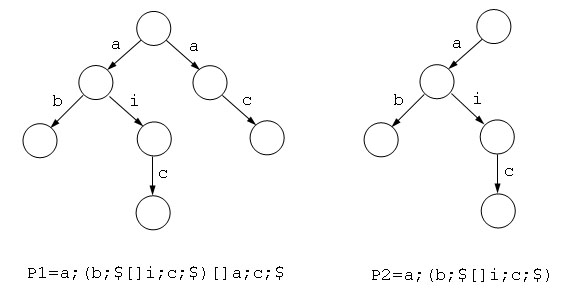
図2.4 プロセスP1,P2の木表現 T(P1),T(P2)
例2-4:
次の2つのプロセスP3,P4は、観測可能なaction a,b,c について、observational equivalentである。
Process P3 := a;(b;$ [ ] c;$)
Process P4 := (a;b;$ [ ] a;c;$)
(P3 == P4) → TRUE
<付記>
定義Def-2.5(4)によって 不可観測なaction (例えば internal action 'i'など )を”取り除いた”プロセス木
T(v1) への変換を、observational reduced tree と呼ぶ。記法としては、( obs. reduced(T1) =
T(v1) ) == T1 と書ける。
例えば、例2-3 のプロセスP1,P2のプロセス木T(P1),T(P2)について、T(P1)(or T(P2))のobservational reduced tree : obs. reduced(T(P1))は、以下のようになる。
obs. reduced(T(P1)) = T( a;(b;$ [ ] c;$) ).
●木の操作(Operations on Process Trees)
プロセス木に対する種々の操作について定義を行う。
定義する操作は、以下の5つである。
---------------------------------------------------------------- |
Parallel composition (with gate G) T1|[G]|T2 については、次章で説明する。
4.1 前置操作(Prefixing)
4.2 (非決定的)選択操作(Choice)
4.3 分離操作(Spliting)
4.4 逐次合成(Sequential Composition)
4.5 再帰(Recursion)
4.1 前置操作(Prefixing)
プロセス木 T のroot節の"前"に、プロセス内actionと無関係なラベル y を置いて(prefix)、新たなプロセス木
T'=y;T を合成すること。定義は以下の通り。
|
Definition of a labell prefixing on T (Def-2.6): Let T be a labelled tree, and y a label not necessarily a label of T. |
プロセス木 T(Q)に ラベル y を prefixing した結果の木 T(Q) の関係は、プロセスQに action y を prefixing した結果のプロセスQの関係と、等価である。つまり、
P=y;Q iff T(P)=y;T(Q).
Def-2.6に基づいて、プロセスPの木表現 T(P) は、プロセスQを△で表すと、以下のようになる。node r は、sub-tree Q の root であった。合成後の新たな root node が w となり、トランジション<w,y,r>によって結ばれている。
y |
4.2 (非決定的)選択操作(Choice)
P1、P2 を、Def-2.1 に基づいたプロセスとする。
T1、T2 を、Def-2.2aに基づいた P1、P2 のプロセス木 T(P1)、T(P2)とする。
ここで、2つのプロセス木 T1,T2 のroot node : r1,r2 を1つの root node : r にまとめて、新たなプロセス木 T = T1[ ]T2 を合成する操作が、非決定的選択操作(choice)である。記法 [] は、2つのプロセスに対する選択操作の2項演算子である。
2つのプロセス木 T1,T2のchoiceは、2つのプロセスP1,P2のchoiceと、等価である。
つまり、
P1 [ ] P2 iff T(P1) [ ] T(P2).
選択操作による合成後のプロセスPの木表現 T(P) は、プロセスP1,P2を△で表すと、以下のようになる。合成後の新たな root node が r となる。
P1△--- r ---△P2 |
4.3 分離操作(Spliting)
Process Graph Transformationともいう。
プロセス木 T(P) が、"ラベルP"自体の incoming arc (つまり、プロセスの最初に戻るようなループを持つようなプロセス)を有すると仮定する。
このとき、T(P) を、再帰プロセスを有しないような プロセス木 T'(P) へ、以下の手順で分離することができる。
|
Process Graph Transformation (Def-2.7): (1) split the start node of T(P) into two, labelled by P' and P". |
T(P)とT'(P)は、strongly equivalentである。
例2-5:
前章で定義した、push button process (PBL) は、push;on;push;offのサイクルを繰り返すようなプロセス定義がなされている。
PBL := push;on;push;off;PBL
上記の変換手順に従って、incoming arc : <(off;PBL), off, PBL>∈Arc(PBL)の戻り先ラベル PBL を PBL' とに分離して、新たなプロセス定義 PBL' を定義すると、以下のようになる。
PBL' := push;on;push;off;PBL
4.4 逐次合成(Sequential Composition)
T1、T2 を、2つのプロセスP1、P2 のプロセス木 T(P1)、T(P2)とする。
ここで、T1は有限でかつSTOP節を有しない木とする。
(finite and deadlock-free labelled trees という)
このとき、プロセス木 T1の全てのleaf(葉)に、T2のroot node を接続して木を合成する操作 T1>>T2 が、逐次合成(Sequential Composition)である。
つまり、プロセスP1 の全てのterminating(記法 $ )の後、プロセスP2が開始される。
例2-6:
Process P1 := coin;(candy;$ [ ] toffee;$)
Process P2 := dispence;$
とする。action : coin, candy, toffee, dispence は、各々、コイン挿入、キャンディ選択、トフィー選択、商品販売、を意味する。
この2つのプロセスを逐次合成して、coinが挿入されて、candy または toffee を1回だけ販売するような、自販機VM1を定義しよう。
この2つのプロセス P1,P2の Sequential Composition : VM1 = P1>>P2 は、以下のようになる。
VM1 = P1>>P2 |
<注意点>
T1がdeadlock-freeな木で"ない"場合、逐次合成を行おうにも、T1側にterminating $ な leafが存在しないため、T2を接続することができない。
この場合、プロセス木 T = T1>>T2 = T1 となり、逐次処理が為されない(T1側がdeadlockであるので、当然である)。
4.5 再帰(Recursion)
TをプロセスPのプロセス木 T(P)とする。
ここで、Tは non-trivial($だけの木ではない)かつ、STOP節を有しない(deadlock-free)木とする。
Yをラベルとして、上記4.4のSequential Compositionを用いて、Y = T>>Y なる"合成"をおこなうことが、再帰(Recursion)である。
つまり、プロセスP の全てのterminating(記法 $ )の後、ラベルY、つまりTの最初に戻る再帰プロセスが形成される。
前章のBLA記法で見た通り、プロセスPを"永遠に繰り返す"ことを *P で表した。つまり、
*P=Q iff *T(P)=T(Q).
<記法上の注意点>
アクションa-->b-->a-->…のように"永遠に繰り返す"場合、BLA記法では *[a;b] のように表現し、terminating $ は書かない。プロセス木における上記の合成を意識して書くならば、leaf X に鑑み、*[a;b] は *(a;b;X) とすべきであるが、通常は leaf は陽に書かない。
例2-7:
Process P1 := coin;(candy;$ [ ] toffee;$)
Process P2' := dispence; P1
この2つのプロセス P1,P2'の Sequential Composition : VM2 = P1>>P2 は、以下のようになる。ここで、P2'からラベルP1への戻りは、再帰合成後のプロセスVM2の root node ラベル、つまり VM2 となることに注意せよ。
VM2 = P1>>P2' |
後に見る、(Basic/Full-)LOTOSによるプロセス定義では、いくつかの機能単位でプロセスを定義し、プロセスのラベルを用いた再帰的な合成を行い、システム内の「繰り返し動作」を扱うようにする場面が多い。
●諸定理(Laws)
プロセス木に対する諸定理についてまとめる。
strongly equivalentであることを、記号 "=" で書く。
observation equivalentであることを、記号 "==" で書く。
trivialな木(= leafがterminating $ のみで、これがroot node でもある木)は、$で書く。
以下の諸定理の全ては、プロセスPiの木表現Tiと読み替えることで、プロセスPiに関する諸定理として適用できる。
(1) Choice : [ ] に関する諸定理
プロセス木 T,$,T1,T2,T1',T2'について、以下が成立する。
Law 2.1: T1[ ]T2 = T2[ ]T1 |
(2) Sequential Composition : >> に関する諸定理
プロセス木 T1, T2 を、finite and deadlock-free labelled tree とする。
このとき、以下が成立する。
Law 2.6: (T1>>T2)>>T3 = T1>>(T2>>T3) |
(3) inaction : i に関する諸定理
プロセス木 T、inaction i とする。
このとき、以下が成立する(obs. equivalent であることに注意)。
Law 2.8: a;i;T == a;T |
練習問題2-1
[1] push buttonモデルのプロセス(PBL)について、その木表現を Def-2.2a に基づいて書け。再帰プロセスであるから、terminatingはない。
[2] 練習問題1-3の自動販売機モデル(VMa,VMb)について、各々のプロセス定義を Def-2.1a に基づいて書け。また、各々の木表現を Def-2.2a に基づいて書け。
[3] 例2-1のプロセス木 T(P1),T(P2) 間の bisimulation R を書け。
[4] 例2-2のプロセス木 T(P3),T(P4) 間の bisimulation R を書け。
[5] 次の2つのプロセスP1,P2が、obs. equivalenceであるか否かを示せ。
Process P1 := i;a;b;$
Process P2 := i;a;b;$ [ ] a;b;$
[6] 次の2つのプロセスP1,P2が、obs. equivalenceであるか否かを示せ。
Process P1 :=i;a;b;$ [ ] b;c;$
Process P2 := a;b;$ [ ] b;c;$
[7] 次の2つのプロセスP1,P2が、obs. equivalenceであるか否かを示せ。
Process P1 := a;(b;$ [ ] i;c;$) [ ] a;c;$
Process P2 := a;(b;$ [ ] i;c;$)
T(P1),T(P2)間の bisimulation R を作成するなかで、Def-2.3の条件に合致しないものは、どの要素か?
[8] 例2-3のプロセス木 T(P1),T(P2)間の action a,b,cの拡張に関するbisimulation R を書け。また、定義Def-2.5の条件(4)を満たしているか、確かめよ。
[9] 例2-4のプロセス木 T(P3),T(P4)を書け。定義Def-2.3に基づいてbisimulation R の作成を試みよ。どのノード間の関係が
bisimilarとしての条件の不整合を為しているか。
[10] Law 1.1: [a;b] = a;*[b;a] を Process Graph Transformation (Def-2.7)
に基づいて証明せよ(ヒント:両辺は、strongly equivalentの関係である)
[11] Law 2.1 〜 2.9 を、各操作と等価性の定義に基づいて証明せよ。
![]()
wasaki@cs.shinshu-u.ac.jp
Copyright(c) Katsumi Wasaki. All rights reserved.