図3.10に示すがごとく、各パルスの値を次の時点まで保持するような
形で復原する回路を零次ホールド回路といい、最も多く使用されている。この伝
達関数は次式で表される。
| (3.32) |
通常ホールド回路と制御対象とは図3.11のように結合するので、
ホールド回路と制御対象を含めたパルス伝達関数は次式で求める。
| (3.33) |
[例]
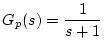 の場合
の場合
図3.12に示すように、ある時点から次の時点までの間は、
そのひとつ前の時点間の傾斜の値を継続するような形式の
ホールド回路もある。これを一次ホールド回路といい、その伝達関数は
次式で表される。
| (3.34) |
![\begin{figure}\begin{center}
\psbox[scale=0.60]{eps/3-3-3.eps} \end{center} \end{figure}](img212.png)
![\begin{figure}\begin{center}
\psbox[scale=0.60]{eps/3-3-5.eps} \end{center} \end{figure}](img217.png)